GPU Architectures
SM (Streaming Mutiprocessor)
- Contains many Cores
NVIDIA Fermi Architecture
-
32-Compute Unified Device Architecture cores
-
4 SFUs
-
16 L/S units
-
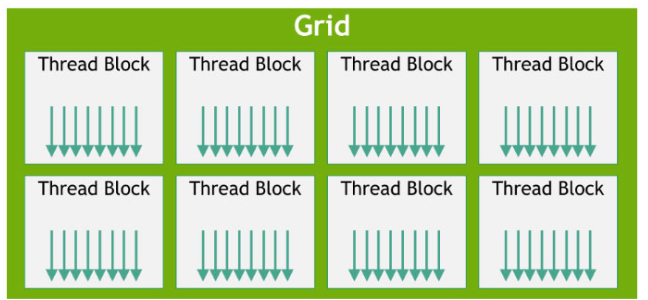
A GPU has threads (of execution)
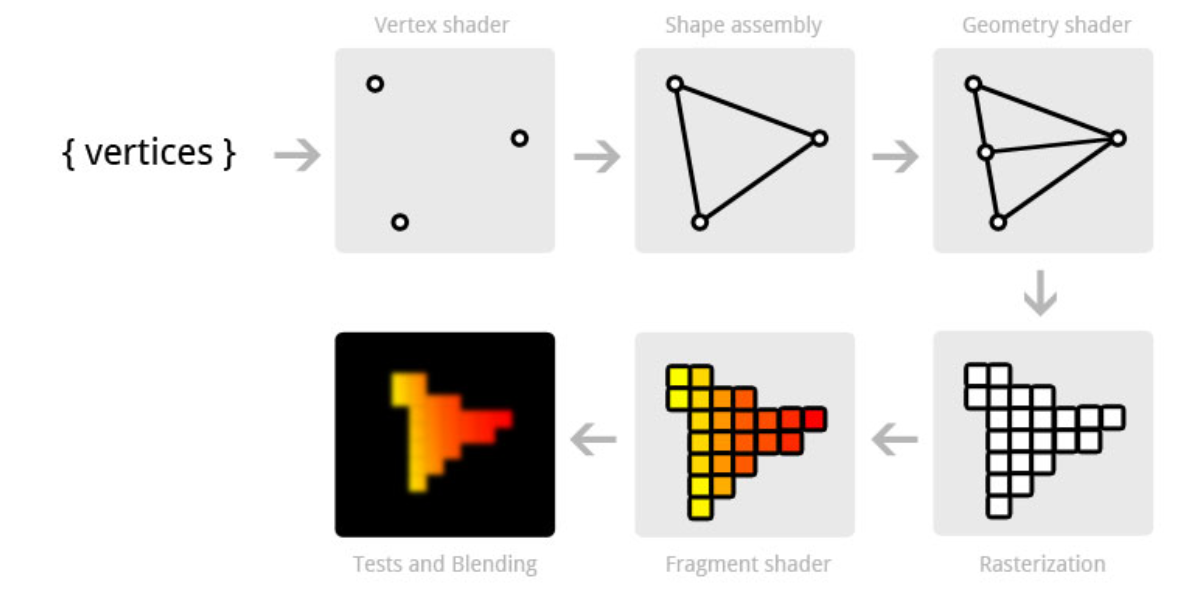
Rendering Pipeline
- 3D Models are calculated on the CPU in world coordinates
- Vertices Shader converts these into a 2D model (local coordinates), applices textures
- Geometry shader: optional additional manipulator
- Fragment shader shades the individual pixels
Organization
Summary: GPU (Graphics Processing Unit) Concepts from the Document
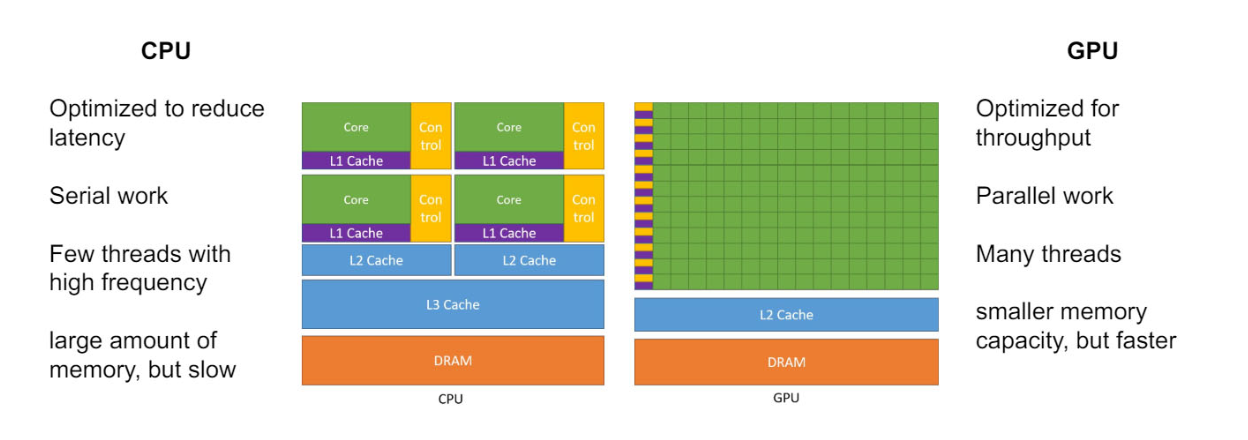
Introduction to GPU Architecture
- GPUs are specialized hardware designed for parallel processing. They excel at handling multiple operations simultaneously, making them ideal for tasks such as graphics rendering, scientific simulations, and machine learning.
Key Components and Functions
-
Processing Elements:
- GPUs consist of numerous smaller cores or processing elements that work together to perform computations.
- These cores are designed for high-throughput computations, allowing the GPU to handle a large number of parallel tasks efficiently.
-
Task Scheduling:
- GPUs use a unique scheduling system to distribute tasks among the available cores.
- Task scheduling in GPU architecture involves distributing tasks among multiple GPU cores based on workload and resource availability.
- The scheduling is typically managed by the GPU driver and runtime environment, ensuring optimal use of the available cores.
-
Command Queue:
- A command queue in OpenCL (Open Computing Language) is a crucial component for managing the execution order of commands.
- The command queue allows for asynchronous execution, enabling multiple tasks to be processed concurrently.
- It also manages resource allocation and ensures that tasks are executed in the correct order.
Programming Models:
-
OpenCL:
- OpenCL is a framework for writing programs that execute across heterogeneous platforms, including CPUs, GPUs, and other processors.
- It provides a standardized interface for developing parallel programs, allowing developers to harness the power of GPUs.
- OpenCL programs consist of kernels, which are functions executed on the GPU, and the host code, which runs on the CPU and manages kernel execution.
-
Single Instruction, Multiple Data (SIMD):
- SIMD is a parallel computing architecture where a single instruction operates on multiple data points simultaneously.
- GPUs leverage SIMD to process large datasets efficiently, as the same operation can be applied to many data points in parallel.
- This approach is highly effective for tasks like image processing, where the same operation needs to be performed on each pixel.
-
Single Program, Multiple Data (SPMD):
- SPMD is a parallel programming model where multiple processors execute the same program but operate on different data.
- In the context of GPUs, this means that each core runs the same kernel but processes different chunks of data.
- This model simplifies the programming process and ensures scalability across a large number of cores.
Synchronization and Data Sharing:
-
Synchronization:
- Synchronization in GPU programming is essential to ensure that tasks are completed in the correct order and data integrity is maintained.
- Techniques like barriers and atomic operations are used to synchronize threads within a kernel.
-
Data Sharing:
- Efficient data sharing mechanisms are crucial for performance in parallel processing.
- GPUs provide shared memory spaces accessible by all threads within a block, enabling fast data exchange.
- Developers must carefully manage data access patterns to minimize conflicts and maximize throughput.
Performance Considerations:
-
Granularity:
- The granularity of tasks—how finely they are divided—affects the performance of GPU programs.
- Fine-grained tasks can exploit more parallelism but may incur higher overhead due to increased synchronization and data management.
-
Load Balancing:
- Ensuring even distribution of work across all GPU cores is essential for optimal performance.
- Load balancing techniques help avoid scenarios where some cores are idle while others are overloaded.
-
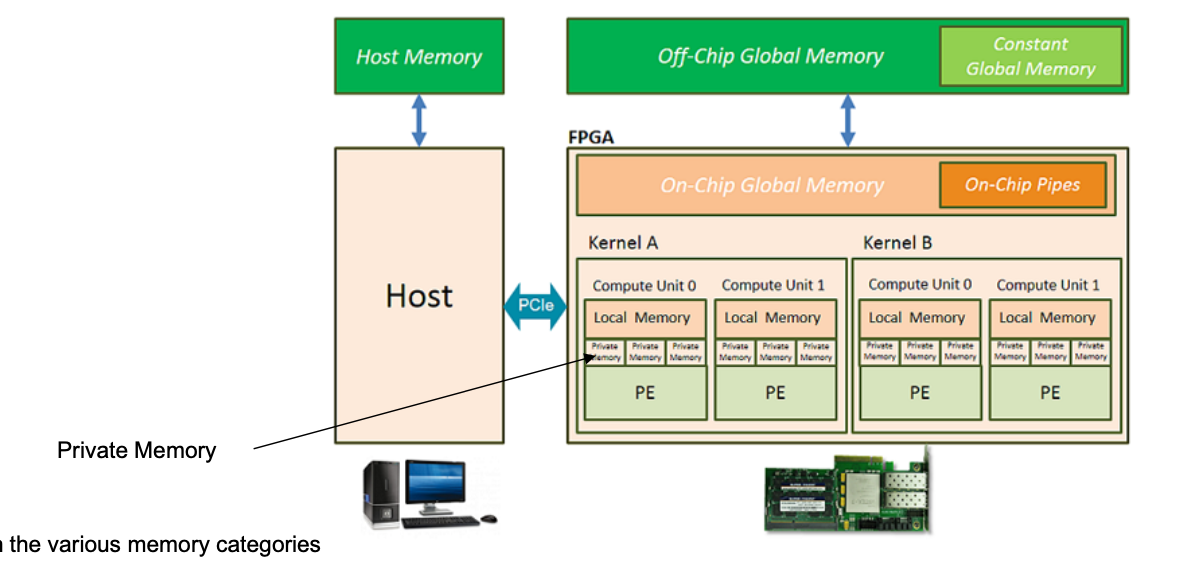
Memory Hierarchies:
- Understanding the GPU memory hierarchy (registers, shared memory, global memory) is crucial for optimizing performance.
- Efficient use of fast, low-latency memory (like registers and shared memory) can significantly boost performance.
Use Cases and Applications:
-
Graphics Rendering:
- GPUs were initially designed for rendering graphics, providing the computational power needed for high-resolution, real-time rendering.
-
Scientific Computing:
- GPUs are widely used in scientific computing for simulations, modeling, and data analysis due to their ability to handle large-scale parallel computations.
-
Machine Learning:
- The parallel processing capabilities of GPUs make them ideal for training machine learning models, particularly deep neural networks.
Conclusion:
- GPUs play a critical role in modern computing by providing the parallel processing power necessary for a wide range of applications.
- Understanding the architecture, programming models, synchronization mechanisms, and performance considerations of GPUs is essential for leveraging their full potential in computational tasks.
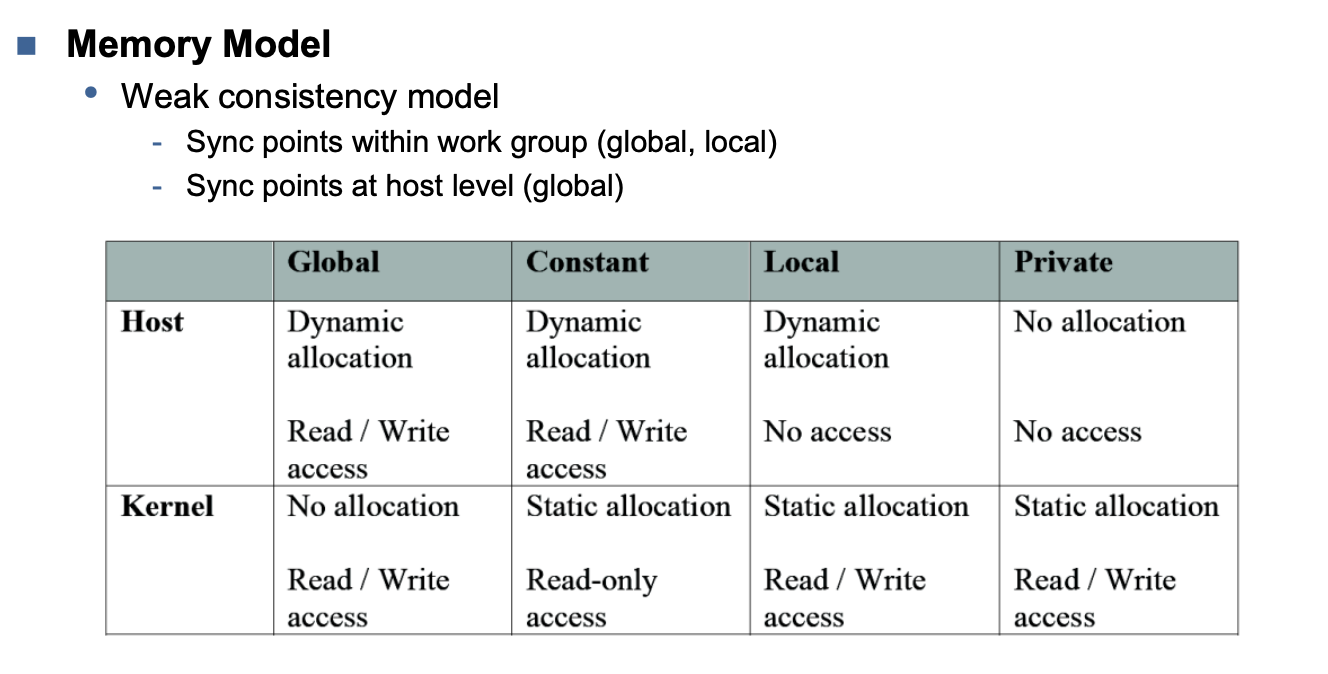
Memory Categories
OpenCL
__kernel void add_numbers(__global float4* data,
__local float* local_result, __global float* group_result) {
float sum;
float4 input1, input2, sum_vector; // array of 4 floats which support vectorization
uint global_addr, local_addr;
global_addr = get_global_id(0) * 2;
input1 = data[global_addr];
input2 = data[global_addr+1];
sum_vector = input1 + input2; // perform four floating-point additions simultaneously
local_addr = get_local_id(0);
local_result[local_addr] = sum_vector.s0 + sum_vector.s1 +
sum_vector.s2 + sum_vector.s3;
barrier(CLK_LOCAL_MEM_FENCE);
if(get_local_id(0) == 0) {
sum = 0.0f;
for(int i=0; i<get_local_size(0); i++) {
sum += local_result[i];
}
group_result[get_group_id(0)] = sum;
}
}